마스 패스파인더
마스 패스파인더(영어: Mars Pathfinder)는 1997년에 화성에 착륙한 무인 착륙선과 이동식 로버를 지칭하는 말로 NASA '디스커버리 계획'의 일환이다. 이동식 로버의 이름은 소저너(Sojourner)이며 본체 착륙선 패스파인더의 이전 명칭은 1996년 12월 20일에 사망한 칼 세이건을 기리기 위해 칼 세이건 추모기지로 명명되었다.[3]
|
Mars Pathfinder | |

| |
| 임무 정보 | |
|---|---|
| 관리 기관 | NASA / JPL |
| 임무 유형 | 착륙선 / 로버 |
| COSPAR ID | 1996-068A |
| 발사일 | 1996년 12월 4일[1] |
| 발사체 | 델타 II 7925 (#D240) |
| 발사 장소 | 케이프커내버럴 공군 기지 |
| 목표 천체 | 화성 |
| 착륙일 | 1997년 7월 4일 16:56:55 UTC[1] |
| 착륙 장소 | 아레스 발리스 북위 19° 7′ 48″ 서경 33° 13′ 12″ / 북위 19.13000° 서경 33.22000° |
| 임무 기간 | 착륙선 : 31일, 30 화성일 (예상 활동일) 85일, 83 화성일 (실제 활동일)[2] 로버 : 7일, 7 화성일[2] 총 임무 기간 : 297일 (발사부터 최후 교신까지) |
| 임무 종료 | 최후 교신 1997년 12월 27일[1] |
| 우주선 정보 | |
| 중량 | 착륙선 : 264 kg / 로버 : 10.5 kg |
| 전력 | 착륙선 : 35 W / 로버 : 13 W |
| 트랜스폰더 | X-밴드 고이득 안테나 |
| 대역폭 | 6kb/s 심우주 통신망 |
마스 글로벌 서베이어가 발사된지 약 한달 뒤인 1996년 12월 4일에 델타 II 로켓에 탑재되어 발사되었고 미국의 독립기념일인 1997년 7월 4일에 화성의 아레스 발리스에 성공적으로 착륙하였다. 착륙 이후에 착륙선이 활동을 위한 날개 모양의 태양 전지판 3개를 전개하였고 소저너 로버도 활동을 개시하면서 임무가 시작되었다. 주 목표는 화성의 대기와 기후, 토양과 암석의 연구였다. 마스 패스파인더는 1976년에 바이킹 착륙선이 착륙한 이후 20년만에 착륙하는 탐사선이였으며 NASA의 화성 탐사 재개가 목적이었다. 또한 마스 옵저버 같은 너무 비싸고 복잡한 탐사선들이 여럿 실패하면서 얻은 교훈을 통해 "더 빠르고 더 뛰어나며 더 값싼"이라는 구호 아래 시행되었으며 임무에 사용된 총 비용은 약 1억 5천만 달러였다.
마스 패스파인더에는 지금까지 사용되지 않은 다양한 종류의 신기술들이 사용됐는데 이때 패스파인더를 통해 검증된 기술들은 오퍼튜니티 로버와 작동은 멈추었지만 쌍둥이 로버인 스피릿 로버에도 사용되었다.
임무 총괄과 명령 조달은 JPL(제트추진연구소)가 맡았다.
임무 목표
편집
탐사 기구
편집
마스 패스파인더에는 화성 토양을 분석하기 위한 여러 종류의 기구들이 착륙선과 로버에 탑재되었다. 본체 착륙선에는 높낮이 조절이 가능한 Imager for Mars Pathfinder (IMP) 라는 360도 회전이 가능한 특수 스테레오 카메라로 2개의 렌즈를 통해 화성의 풍경을 촬영할 수 있는 컬러 카메라였다. 미국의 애리조나 대학교에서 제작하였으며 록히드 마틴 외 여러 기업에서 지원해주었다.[5] 또한 화성의 대기와 기후를 분석하는 Atmospheric Structure Instrument / Meteorology Package (ASI/MET) 라는 기구도 탑재되었는데 ASI는 온도와 기압, 바람에 관한 정보를 수집할 수 있었고 MET은 3개의 바람자루가 탑재되어 화성에서 부는 바람의 풍속을 측정할 수 있었다.[6]
소저너 로버는 화성 표면에서 운행하는 최초의 로버였다. 러시아에서 달에 로버를 먼저 보내긴 했으나 화성에서 운행하는 로버는 소저너가 최초였다. 소저너는 6개의 바퀴가 부착되어 있었으며 평균 주행 속도는 초속 1 cm 정도였고, Alpha Proton X-ray Spectrometer (APXS) 라는 X-레이 분광기가 탑재되어 있었는데 이는 러시아의 화성 탐사선이였던 마스 96 호에도 쓰인 기구였지만 소저너 로버에 탑재된 분광기는 마스 96 호의 것과는 달리 약간의 개량을 거친 버전이었다.[5] APXS는 화성 표면에서 토양과 암석의 성분을 검사하는 역할을 했고 흑백 카메라와 컬러 카메라가 각각 한 개씩 탑재되었는데, 몇 밀리미터에서 몇백 미터 거리에서 화성의 표면을 촬영할 수 있었고 이를 통해 화성 지질학과 암석들에 관한 정보 수집과 연구가 가능했다.
또한 0.3 메가픽셀의 해상도를 가진 주행용 네비게이션 흑백 카메라가 탑재되었고 장애물이나 위험을 탐지하는 레이저 기구가 5개 탑재되어 있었다. 착륙선과 소저너 로버 모두 전력원은 태양 전지판에서 공급받았으며 착륙선은 날개 모양의 태양 전지판 3개에서 35 W 를, 소저너 로버는 로버 상단에 부착된 태양 전지판에서 13 W를 공급받으며 활동했다. 정보 송수신에는 X-밴드 고이득 안테나가 사용되었고 대역폭은 6kb/s 심우주 통신망이었다.

왼쪽부터 소저너 로버, 오퍼튜니티 / 스피릿 로버, 큐리어시티 로버이다.
패스파인더 (착륙선)
편집- Imager for Mars Pathfinder (IMP) : 360도 회전이 가능한 컬러 카메라
- Atomspheric Structure Instrument (ASI) : 온도, 기압, 바람에 관한 정보를 수집하는 기기
- MEteorology Package (MET) : 3개의 바람자루가 탑재된 기후 측정 기기
소저너 (탐사차)
편집- Imaging system : 흑백 / 컬러 카메라
- Laser striper hazard detection system : 장애물이나 위험을 탐지하는 레이저 기기
- Alpha Proton X-ray Spectrometer (APXS) : 토양이나 암석의 성분을 분석하는 X-레이 분광기
착륙
편집

착륙 과정
편집- 1997년 7월 4일, 6.1 km/s의 속도로 화성 대기권 돌입
- 이 이후, 탐사선은 반송파만 송신하고, 각 사건시에는 신호를 송신. 지구에서는 도플러 효과로 탐사선의 속도를 계측.
- 내열 셀에 의한 에어브레이킹으로 370 m/s까지 감속
- 직경 약 11 m의 낙하산을 전개해 68 m/s까지 감속
- 20초 후, 내열 셀을 분리
- 20초 후, 착륙선이 에어로 셀에서 분리되어 20 m의 줄에 매달림
- 고도 1.6 km에서 화성의 대기를 관측
- 고도 335 m 지점에서 에어백을 전개
- 고도 96 m 지점에서 고체 로켓 분사
- 2.3초 후 고도 21.5 m 지점에서 줄을 절단
- 14 m/s 로 화성 표면에 착륙
- 에어백에 의해 15.7 m의 높이까지 튕겨짐
- 적어도 15회 튕겨진 후 정지
- 16:55:55 UTC, 화성에 착륙
- 에어백의 가스 제거
- 착륙 74분 후, 착륙선의 전개를 종료
- 21시 00분 착륙 지점에 일출이 시작됨. 1 화성일(솔 1)의 시작
- 같은 시각, 착륙 후 최초의 교신이 성공함
2 화성일에(솔 2), 사진에서 에어백의 하나가 완전히 사그러들지 않은 것이 확인되어 로버가 화성 표면에서 이동하는 데 장애가 될 것으로 예상되었다. 지구에서의 지시에 의해 착륙선의 패널을 하나 움직여 무사히 로버를 화성 표면으로 이동시켰다.
임무의 종료
편집당초 약 1주일에서 1개월 정도 활동할 것이라고 생각되었던 로버와 착륙선이지만, 착륙으로부터 83 화성일 후인 1997년 9월 27일 10:23 UTC에 패스파인더와의 통신이 두절될 때까지 약 3개월간 작동했다. NASA는 1998년 3월 10일까지 통신 재개를 시도했지만, 10월 7일에 짧은 신호를 수신한 것 외에는 통신은 재개되지 않았다.
통신 두절의 원인은 불분명하지만, 로버는 문제가 없는 상태에서 착륙선이 저온에 의해 고장났을 가능성이 있다. 이 경우, 로버는 미리 지구와의 통신이 두절되었을 경우 착륙선 근방으로 이동하지만, 다만 착륙선에 탑승해선 안 된다고 프로그램되어 있었는데, 이 때문에 착륙선 주위를 고장날 때까지 회전했을 것이라고 추측되었다.
착륙 장소
편집마스 패스파인더의 착륙지는 화성의 북반구에 위치한 아레스 발리스로 암석이 많은 지대였는데, 과학자들이 이 곳을 선택한 이유는 탐사를 진행하고 정보를 수집할 만한 암석이 많은 지대 중에서 상대적으로 착륙하기 안전한 지형이기 때문이었다. 마스 패스파인더는 1997년 7월 4일에 북위 19° 08′ 서경 33° 13′ / 북위 19.13° 서경 33.22° [7]에 위치한 아레스 발리스에 성공적으로 착륙하였다.
이후에 착륙 지점은 미국의 천문학자인 칼 세이건을 기리기 위해 칼 세이건 추모기지로 명명되었다.

착륙지
편집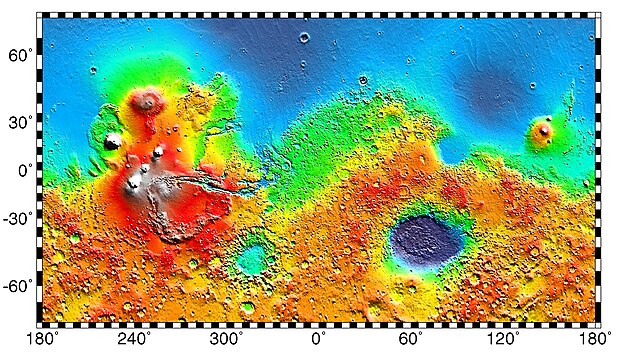
같이 보기
편집외부 링크
편집- 마스 패스파인더 NASA/JPL 웹사이트
- NASA의 태양계 탐사를 통한 마스 패스파인더 임무 프로파일
- 테드 스트릭의 마스 패스파인더 페이지
- "A Crawl On Mars" - Ted Stryk's 체류 탐사 페이지
- NASA 우주과학국
- JPL -화성 탐사 임무
- Authoritative Account of MPF Reset Issue -패스파인더의 소프트웨어 문제에 관한 글
- A Little Rock on Mars - 패스파인더의 착륙에 대한 아이들의 이야기 ( 패스파인더 착륙에 대한 어린이의 이야기)
- 화성 정찰위성으로 본 패스파인더의 착륙 지점
각주
편집- ↑ 가 나 다 Nelson, Jon. “Mars Pathfinder / Sojourner Rover”. 《NASA》. 2014년 2월 19일에 원본 문서에서 보존된 문서. 2014년 2월 2일에 확인함.
- ↑ 가 나 “Mars Pathfinder Landing Press Kit” (PDF). 《NASA》. 1997년 7월 글. 2015년 10월 14일에 확인함.
- ↑ “Mars Pathfinder”. 《NASA》. 2005년 4월 13일에 원본 문서에서 보존된 문서. 2015년 7월 10일에 확인함.
- ↑ “Mars Pathfinder Mission Objectives”. 《NASA》. 2015년 10월 14일에 확인함.
- ↑ 가 나 “Mars Pathfinder Instrument Descriptions”. 《NASA》. 2015년 10월 14일에 확인함.
- ↑ “Windsocks on Mars”. 《NASA》. 2015년 10월 14일에 확인함.
- ↑ “Mars Pathfinder Science Results”. 《NASA》. 2012년 4월 2일에 원본 문서에서 보존된 문서. 2015년 10월 19일에 확인함.